Az ultrahangos érzékelők bemutatása
Korábbi cikkeink közül néhány a személygépkocsikban megtalálható szenzorokkal foglalkozott. Most folytatjuk ezt a szériát egy olyan változattal, amely bár nem a leggyakrabban használt érzékelő az autóiparban, felhasználási területe rendkívül széleskörű, ha az ipar többi szegmensét is figyelembe vesszük.
Az alábbi bejegyzésünkben bemutatjuk az ultrahangos szenzor működési elvét, szerkezeti felépítését, valamint bemutatunk néhány példát a járműveken és azokon kívül.
Az ötlet eredete
Mint minden érzékszervünknél, a fülünk esetén is létezik egy általános érzékelési tartomány, mely alatt és felett képtelenek vagyunk hallani a hangokat. Szakirodalomtól függ, hogy pontosan hová helyezik a tartományt, jellemzően 16 Hz és 16 000 Hz, vagy 20 Hz és 20 000 Hz közé jelölik (a pontos érték természetesen függ az alany egészségi állapotától, életkorától és sok más fiziológiai tényezőtől). Ez alatti frekvencián infrahangokról, fölötte pedig ultrahangokról beszélünk.
A hang tehát hullámként viselkedik, terjedési sebessége erősen függ a közegtől – levegőben, 20 °C-os hőmérséklet mellett, tengerszinten nagyjából 340 métert tesz meg másodpercenként. Ez nem függ a kibocsátott hang frekvenciájától, ez utóbbi viszont döntően befolyásolja, hogy a légkörben mekkora távolságra képes eljutni.

Az infrahangok alacsony frekvenciával és nagy hullámhosszal rendelkeznek, közeli kommunikációra nem a leghatékonyabb, ám nagy távolságokat képes megtenni elnyelődés nélkül. Sok állat azért képes követni a sivatagi esőzést, mert messziről érzékeli a villámok hangjának infratartománybeli komponenseit.
Az ultrahang sokkal hamarabb elnyelődik a légkörben, kisebb távolságokon viszont tökéletes távmérőnek bizonyul. A természetben előforduló legáltalánosabb példa bizonyos denevérfajok vadászmódszerei, illetve kommunikációja. A denevér képes ultrahangot kibocsátani, így a legtöbb élőlény nem hallhatja a közeledését, ő viszont ezáltal képet kap a környezetéről, és gyakorlatilag látás nélkül képes áldozatát elejteni.
Az ultrahangos érzékelők pontosan ugyanezt a módszert alkalmazzák.
Működési elv
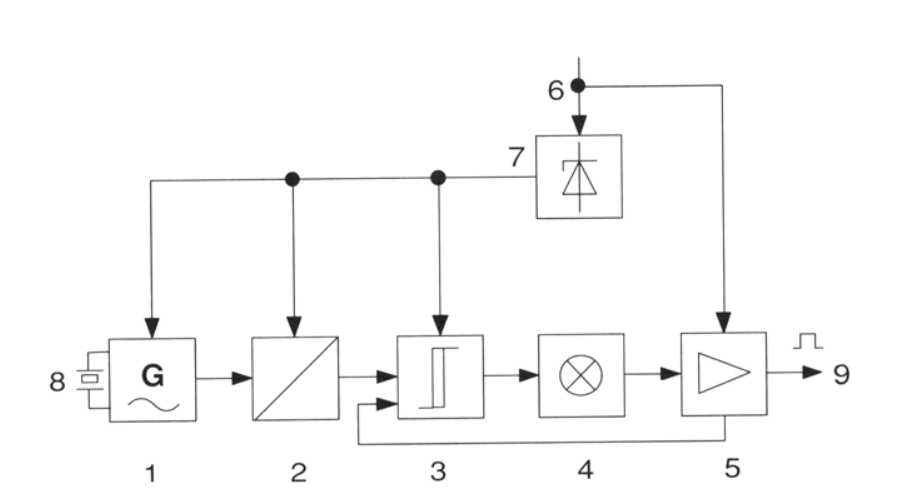
Az ultrahangos érzékelők az ultratartományban lévő nagyfrekvenciás hanghullámok visszaverődésének elve alapján működik. Egy rövid, impulzusszerű jel kibocsátása után a szenzor adó üzemmódból vevő üzemmódba kapcsol át, azaz hangszóróból mikforonná alakul, és érzékeli a reflektált jelet.
Az ultrahangos szenzorokban az alkalmazott hang frekvenciája széles skálán mozog, jellemzően 30 és 300 kHz között, az impulzusok ismétlési frekvenciája 1 és 100 Hz kötött található. Szűrőkapcsolás segítségével zárhatók ki a visszavert impulzusoktól eltérő, a környezetből származó zavaró jelek.
A lenti példa tökéletesen szemlélteti az ultrahangos érzékelő működését.
A bal oldali esetben az érzékelő látómezőjében nem található semmi, csak a referenciafal, melynek pozíciója a vizsgálat alatt ismertté válik.
Az érzékelő alatt láthatunk egy stilizált képernyőt, melyek két egyforma impulzuscsúcsot figyelhetünk meg. A két csúcs közötti távolság a képernyőn egyenértékű azzal a távolsággal, amilyen messze a fal található az érzékelőtől.
A második esetben egy testet helyezünk az ultrahangos szenzor és a fal közé, „D” távolságra. Az érzékelő, mivel a test nem fedi le a teljes látóterét, továbbra is érzékelni fogja a falat, de nem annyira erős visszaverődő jellel, mint az első esetben, amikor nem volt az útjában semmi.

A szenzor két impulzusválaszt fog kapni: egyet a testtől, egyet pedig a faltól. Mivel a test van hozzá közelebb, a reflektív jel onnan fog hamarabb visszaérkezni.
A jobb oldali képernyőn az első és a második jel közötti távolság egyenértékű lesz az újonnan behelyezett test és a szenzor közötti távval, míg az első és a harmadik csúcs közötti továbbra is az érzékelő és a fal közötti távolságnak felel meg.
Belátható, hogy amennyiben a faltól való távolság ismert (ez a gyakorlatban megfelel a kalibrálási folyamatnak), bármilyen, a szenzor zónájába helyezett test pozíciója szinte valós időben meghatározható.
Ez már csak azért is igaz, mert az ultrahangos érzékelő számára nem létezik olyan anyagjellemző korlátozás, mint az induktív szenzorok esetén. Gyakorlatilag bármilyen objektumot észlelhetünk általa, függetlenül az anyagtól, formától, színtől, és részben halmazállapottól is: folyékony illetve por alapú is lehet.
Jellemzők
A szenzorok üzemi feszültsége általában 24 Volt, a kapcsolási távolságuk azonban nagyon széles skálán mozog, mivel rengeteg területen alkalmazzák – többnyire 100 milliméter és 1 méter közötti érték, de nem ritka a 10 méteres zóna sem.
Természetesen ennek a szenzornak is akad gyenge pontja: az alkalmazás egyik korlátja a környezeti hőmérséklet. 0 °C alatt nem, vagy csak nehezen használható az ultrahangos érzékelő, és a nagyon magas hőmérsékletet sem tolerálja: 70 °C a felső limit.
Kapcsolási frekvenciája 1 Hz és 125 Hz között van, élettartama jellemzően hosszú. A többnyire henger vagy hasáb alakú eszköz mérsékelten érzékeny a szennyeződésekre, tehát poros, párás, füstös környezetben is használható.
Gyakorlati megvalósítások
A legegyszerűbb és legáltalánosabb felhasználási mód személygépkocsikban a parkradar, valamint a tolatóradar. Ezek szinte minden esetben ultrahangos érzékelők.
Az önvezető járművek általában oldalt is rendelkeznek ilyen szenzorokkal, noha bizonyos esetekben a távolságérzékelési feladatok is optikai érzékelők látják el (pl. Tesla).
Autóiparon kívül alkalmazásból végtelen a lista: gyártósorok termékérzékelése (számolás, leválogatás), valamint roncsolásmentes anyagvizsgálatok közkedvelt eszköze, ilyet találunk a torpedók szonárjában, a terhességi ultrahang vizsgálatokat végrehajtó készülékben, különböző tartályok folyadékszintjének ellenőrzésére, valamint a biztonsági rendszerek mozgásérzékelőiben is ez a szenzor dolgozik.