Algoritmus a zöldebb mobilitásért: Akár 8 százalékkal nagyobb hatótávolság a valós vezetés során
Az olyan segédrendszerek, mint például az adaptív sebességtartó automatika, nemcsak kényelmesebbé tehetik a vezetést, hanem energiamegtakarítást tesznek lehetővé, és hatékonyabb vezetési stratégiák révén növelik az elektromos hatótávolságot. A ZF kifejlesztett egy prediktív adaptív sebességtartó automatikát (ACC), a ZF Eco Control 4 ACC-t, amely akár nyolc százalékkal nagyobb hatótávolságot tesz lehetővé. Ennek az ACC-kiegészítőnek az egyik fő összetevője az Embotech Model Predictive Control (MPC) optimalizáló algoritmusa. Különösen valós idejű térképinformációkat értékel, például emelkedőn és lejtőn lejtőket és íveket, valamint a járművön belüli információkat a hajtáslánc optimális működési pontjairól.
A ZF sikeres helyszíni tesztjei kimutatták, hogy az Eco Control 4 ACC akár nyolc százalékos hatótávolság-növekedést is képes elérni valós forgalomban. A sorozatos ACC-k kiegészítő funkciójaként személygépkocsikban és haszonjárművekben egyaránt használható, hajtáslánc típusától függetlenül.
„Az Eco Control 4 ACC egy úttörő fejlesztés, amely jelentős lépéssel közelebb visz a Vision Zero károsanyag-kibocsátás felé” – mondta Uwe Class, a ZF fejlett rendszerfejlesztési alelnöke. “Ez a megoldás mindenekelőtt praktikus a mindennapi használatra és sorozatgyártásra is elérhető.”
Alexander Domahidi, az Embotech technológiai igazgatója és társalapítója hozzátette: „Az Eco Control 4 ACC változást jelent a CO2-kibocsátás csökkentésében. Az akár nyolc százalékos megtakarítási lehetőség „csak egy kódrészlettel” óriási lépést jelent a környezetbarátabb mobilitás és közlekedés forradalmasítása felé. Ez az egyik bizonyítéka az Embotech azon elkötelezettségének, hogy önálló szoftvermegoldásokat kínáljon, amelyek fenntarthatóbbá teszik ügyfeleink technológiáját.”
Az MPC optimalizáló algoritmus maximalizálja a hatékonyságot vagy minimalizálja az utazási időt
Az optimális vezetési stratégia alapja az adott vezető egyéni döntése, hogy a prediktív sebességtartó automatika maximalizálja-e a hatékonyságot vagy minimalizálja az utazási időt. A két stratégia kiegyensúlyozott keveréke is lehetséges. Ezenkívül az asszisztens rendszer a lehető legjobban a vezető által beállított sebességhez igazodik. Ezen beállítások alapján minden más automatikusan fut.
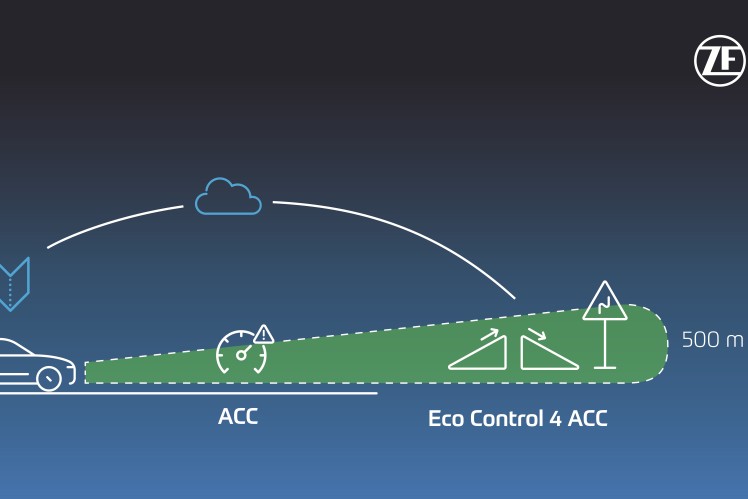
Az algoritmus ezentúl a következő 500 méteren folyamatosan értékeli a navigációs rendszerben lévő térképadatokat és a hajtáslánc üzemi adatait. Ez azt jelenti, hogy a következő emelkedő- és lejtőkről, ívekről vagy sebességkorlátozásokról szóló információk folyamatosan beépülnek az értékelésbe, és az asszisztens rendszer igyekszik a lehető legjobb módon egyensúlyozni az idő és az energia között. A hagyományos adaptív tempomatokkal ellentétben ez a vezérlőrendszer nem mereven szabályalapú: az optimalizálás során a szoftver az összes alapértelmezett beállítást mérlegeli az összes lehetséges használati esethez képest 500 méteres horizonton, egyszerre és valós időben. Ezenkívül a rendszer a hajtáslánc hatékonysági térképeit használja az aktuális működési pont optimalizálására.
Itt a ZF és az Embotech kompetenciái tökéletesen kiegészítik egymást: míg a ZF a teljes jármű rendszerismeretéből, valamint a gyorsítás és fékezés vezérléséből képes biztosítani a megfelelő információkat az asszisztens rendszer számára, az Embotech hozzájárul a megfelelő algoritmusok mély megértéséhez. -az adatok és beágyazott megoldásai időbeli értékelése. Összességében a két partner kifejlesztett egy olyan rendszert, amely nagyobb hatótávolságot és alacsonyabb üzemeltetési költségeket biztosít a vezetőknek a kényelem feláldozása nélkül, és így fenntarthatóan csökkentheti a környezet terhelését. A ZF által kiszolgált lehetséges alkalmazások spektruma a személygépkocsiktól a buszokig és a nehéz haszongépjárművekig terjed.