Az „okos” futómű, és ami mögötte van
Már több mint 30 éve, hogy a Formula-1-ben először vetették be a teljesen aktív felfüggesztést, melyet nagy sikerrel alkalmazott a Williams-Renault csapata – és amit aztán be is tiltottak a Száguldó Cirkuszban. A közúti hasznosítása azonban továbbra is lehetséges, és ezzel gyakran élnek is a gyártók – egyre inkább.
Ebben a cikkben kategorizáljuk a jelenleg aktuális rendszereket, valamint rámutatunk a legfőbb különbségekre egy hagyományos futóműhöz képest.
Definíció, alaptípusok
Az aktív felfüggesztés egyfajta gépjármű-felfüggesztés a járművön. Fedélzeti rendszerrel szabályozza a jármű kerekeinek függőleges mozgását az alvázhoz vagy a jármű karosszériájához képest, nem pedig a nagy rugók által biztosított passzív felfüggesztést, ahol a mozgást teljes mértékben az útfelület határozza meg.
Az aktív felfüggesztések két osztályba sorolhatók: valódi aktív felfüggesztések és adaptív vagy félaktív felfüggesztések. Míg a félig adaptív felfüggesztések csak a lengéscsillapító szilárdságát változtatják a változó út- vagy dinamikus körülményekhez igazodva, addig az aktív felfüggesztések valamilyen típusú működtetőelemet használnak az alváz külön-külön emelésére és süllyesztésére minden keréknél.
Ezek a technológiák lehetővé teszik az autógyártók számára, hogy jobb menetminőséget és autókezelést érjenek el azáltal, hogy a gumikat a kanyarokban az útra merőlegesen tartják, ami jobb tapadást és irányíthatóságot tesz lehetővé.
Egy fedélzeti számítógép érzékeli a karosszéria mozgását az érzékelőktől a járműben, és ezen adatok felhasználásával szabályozza az aktív és félaktív felfüggesztések működését. A rendszer gyakorlatilag kiküszöböli a karosszéria dőlését és dőlésszögének ingadozását számos vezetési helyzetben, beleértve a kanyarodást, a gyorsítást és a fékezést.
Működés
A toronydaru-elmélet szerint az ideális felfüggesztés lehetővé teszi, hogy a jármű olyan stabil testtartást tartson fenn, mintha egy képzeletbeli horog függesztette volna fel az égen, és semmilyen szinten nem befolyásolják az útviszonyok.
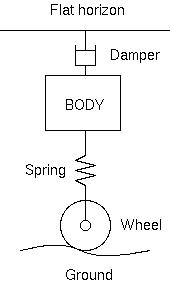
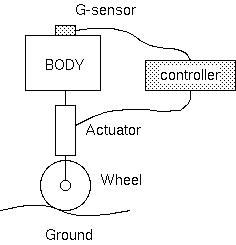
Mivel egy tényleges toronydaru nyilvánvalóan nem praktikus a jelen probléma megoldására, a valódi aktív felfüggesztési rendszerek működtetőműveleteken alapulnak. A képzeletbeli vonal (nulla függőleges gyorsulás) a jármű karosszériájára felszerelt gyorsulásérzékelő által szolgáltatott érték alapján kerül kiszámításra (lásd 3. ábra). A dinamikus elemek csak a lineáris rugóból és a lineáris lengéscsillapítóból állnak; ezért nincs szükség bonyolult számításokra.
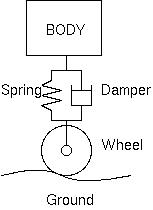
A jármű a rugón és a lengéscsillapítón keresztül érintkezik a talajjal egy normál rugós lengéscsillapító felfüggesztésben, mint az 1. ábrán. A toronydaru-elmélettel azonos szintű stabilitás eléréséhez a járműnek érintkeznie kell a talajjal a rugón keresztül, és a képzeletbeli vonalon keresztül abban az esetben, ha a csillapítási együttható végtelen értéket ér el, a jármű olyan állapotba kerül, ahol teljesen a képzeletbeli vonalhoz van rögzítve, így a jármű nem rázkódik.
Aktív futóművek
Az elsőként bevezetett aktív felfüggesztések külön működtetőket használnak, amelyek független erőt tudnak kifejteni a felfüggesztésre a menettulajdonságok javítása érdekében. Ennek a kialakításnak a hátrányai a magas költségek, a berendezés bonyolultsága és tömege, valamint a gyakori karbantartás szükségessége egyes megvalósításoknál. A karbantartás speciális eszközöket igényelhet, és bizonyos problémákat nehéz lehet diagnosztizálni.
Hidraulikus futóművek
A hidraulikusan működtetett felfüggesztések vezérlése hidraulika segítségével történik. Az első példa 1954-ben jelent meg, a hidropneumatikus felfüggesztéssel, amelyet Paul Magès fejlesztett ki a Citroënnél. A hidraulikus nyomást egy nagynyomású radiáldugattyús hidraulikus szivattyú biztosítja. Az érzékelők folyamatosan figyelik a karosszéria mozgását és a jármű menetszintjét, folyamatosan új adatokkal látják el a hidraulikus magasság-korrektorokat. Néhány ezredmásodperc alatt a felfüggesztés ellenerőket generál a karosszéria megemelésére vagy süllyesztésére.
A gyakorlatban a rendszer mindig magában foglalta a kívánatos önbeálló felfüggesztést és az állítható magasságú felfüggesztést, amely utóbbit a jármű sebességéhez kötötték a jobb aerodinamikai teljesítmény érdekében, mivel a jármű nagy sebességgel süllyed.
Több millió sorozatgyártású jármű készült ennek a rendszernek a változataival.
Elektrohidraulikus működtetés
Az érzékelők folyamatosan figyelik a test mozgását és a jármű menetszintjét, folyamatosan új adatokkal látják el a számítógépet. Miközben a számítógép adatokat fogad és feldolgoz, működteti a hidraulikus szervókat, amelyek mindegyik kerék mellé vannak szerelve. A szervo-szabályozású felfüggesztés szinte azonnal ellenerőt hoz létre a test dőlésére, merülésére és guggolásra a vezetési manőverek során.
A Computer Active Technology Suspension (CATS) a lehető legjobb egyensúlyt hangolja össze a menetminőség és a kezelhetőség között az útviszonyok elemzésével, és másodpercenként akár 3000 módosítást végez a felfüggesztés beállításain elektronikusan vezérelt lengéscsillapítókon keresztül.
Az F1-es debütálás után az 1999-es Mercedes-Benz CL-osztály (C215) bevezette az Active Body Control-t, ahol a nagynyomású hidraulikus szervókat elektronikus számítástechnika vezérli, és ez a funkció továbbra is elérhető. A járműveket úgy lehet megtervezni, hogy aktívan dőljenek a kanyarokban az utasok kényelmének javítása érdekében.
Elektromágneses rekuperatív
A teljesen aktív, elektronikusan vezérelt sorozatgyártású autókban az elektromos szervók és az elektronikus számítástechnikával összekapcsolt motorok lehetővé teszik a lapos kanyarokat és az útviszonyokra való azonnali reakciókat.
Az elektromágneses aktív felfüggesztés lineáris elektromágneses motorokat használ minden kerékhez. Rendkívül gyors reagálást biztosít, és lehetővé teszi az elfogyasztott teljesítmény regenerálását a motorok generátorként történő használatával. Ez szinte felülmúlja a hidraulikus rendszerek lassú reakcióidejének és nagy energiafogyasztásának problémáit.
Adaptív és félaktív rendszerek
Az adaptív vagy félaktív rendszerek csak a lengéscsillapító viszkózus csillapítási együtthatóját tudják megváltoztatni, és nem adnak energiát a felfüggesztési rendszerhez. Míg az adaptív felfüggesztések általában lassú időreakcióval és korlátozott számú csillapítási együttható értékkel rendelkeznek, a félaktív felfüggesztések időreakciója közel néhány milliszekundum, és a csillapítási értékek széles tartományát biztosítják.
Ezért az adaptív felfüggesztések általában csak különböző menetmódokat (komfort, normál, sport…) javasolnak, amelyek különböző csillapítási együtthatóknak felelnek meg, míg a félaktív felfüggesztések valós időben módosítják a lengéscsillapítást, az útviszonyoktól és az autó dinamikájától függően.
Szolenoid-/szelepműködtetésű
Ez a típus a félaktív felfüggesztések leggazdaságosabb és legalapvetőbb típusa. Ezek egy mágnesszelepből állnak, amely megváltoztatja a hidraulikus közeg áramlását a lengéscsillapítóban, ezáltal megváltoztatja a felfüggesztés csillapítási jellemzőit. A mágnesszelepek a vezérlő számítógéphez vannak kötve, amely a vezérlési algoritmustól függően parancsokat küld nekik.
Magnetorheológiai csillapító
Egy másik meglehetősen új módszer a MagneRide márkanévvel ellátott magnetorheológiai lengéscsillapítókat tartalmazza. Eredetileg a Delphi Corporation fejlesztette ki a GM számára, és sok más új technológiához hasonlóan alapfelszereltség volt a Cadillac STS-hez (2002-es modelltől), és néhány más GM-modellhez 2003-tól.
A lengéscsillapító folyadék fémrészecskéket tartalmaz. A fedélzeti számítógépen keresztül a lengéscsillapítók megfelelőségi jellemzőit elektromágnes szabályozza. Lényegében a csillapító mágneses áramkörébe áramló áram növelése növeli az áramkör mágneses fluxusát. Ez viszont megváltoztatja a fémrészecskék beállítását, ami növeli a folyadék viszkozitását, ezáltal növeli a kompressziós/visszapattanási sebességet, míg a csökkenés lágyítja a lengéscsillapítók hatását azáltal, hogy a részecskéket az ellenkező irányba igazítja.